Sam Moore
Duke Robotics Ph.D.
About Me
I am an NSF Graduate Research Fellow in the General Robotics Lab at Duke University, advised by Boyuan Chen. Prior to joining the GRL, I was a member of the Dynamical Systems Lab advised by
Brian Mann.
I research robotics, dynamical systems/mechanics, learning, and optimization. Recently, I've been focused on developing smooth neural dynamics for model-based reinforcement learning and whole-body control. I also like physiology and biomechanics, which I studied as an undergrad.
I like working on challenging problems that sit at the intersection of multiple fields, and I enjoy using accelerated computing, differentiable programming, and numerical methods to tackle these problems.
In my free time, I enjoy watching Cincinnati sports (regrettably), calisthenics/weight lifting, all things outdoors, and just hanging out with my cat, Molly. I might also be one of the only valid Kentucky and Duke fans out there.
I am actively seeking a full-time position in industry or academia after my graduation in summer 2026. Please feel free to contact me if my background aligns with your interests.
Research
Learning Legged MPC with Smooth Neural Surrogates [Project page] [Paper] [Code] [YouTube] We introduce a neural dynamics model that is scalable, generalizes reliably, and excels at gradient-based optimization at test time. The result is the smooth neural surrogate: an architecture with explicit smoothness control to attenuate stiff contact transitions and interpolate reliably in regions where data are sparse or standard neural networks fail. |
Sym2Real: Symbolic Dynamics with Residual Learning for Data-Efficient Adaptive Control
[Project page]
[Paper]
[Code]
[YouTube]
|
Automated Global Analysis of Experimental Dynamics through Low-Dimensional Linear Embeddings
[Project page]
[Paper]
[Code]
[YouTube]
|

LAPP: Large Language Model Feedback for Preference-Driven Reinforcement Learning
[Project page]
[Paper]
[Code]
[YouTube]
|
Semantic Visual Self-Modeling for Whole-Body Awareness in Legged Robots
[Code]
|
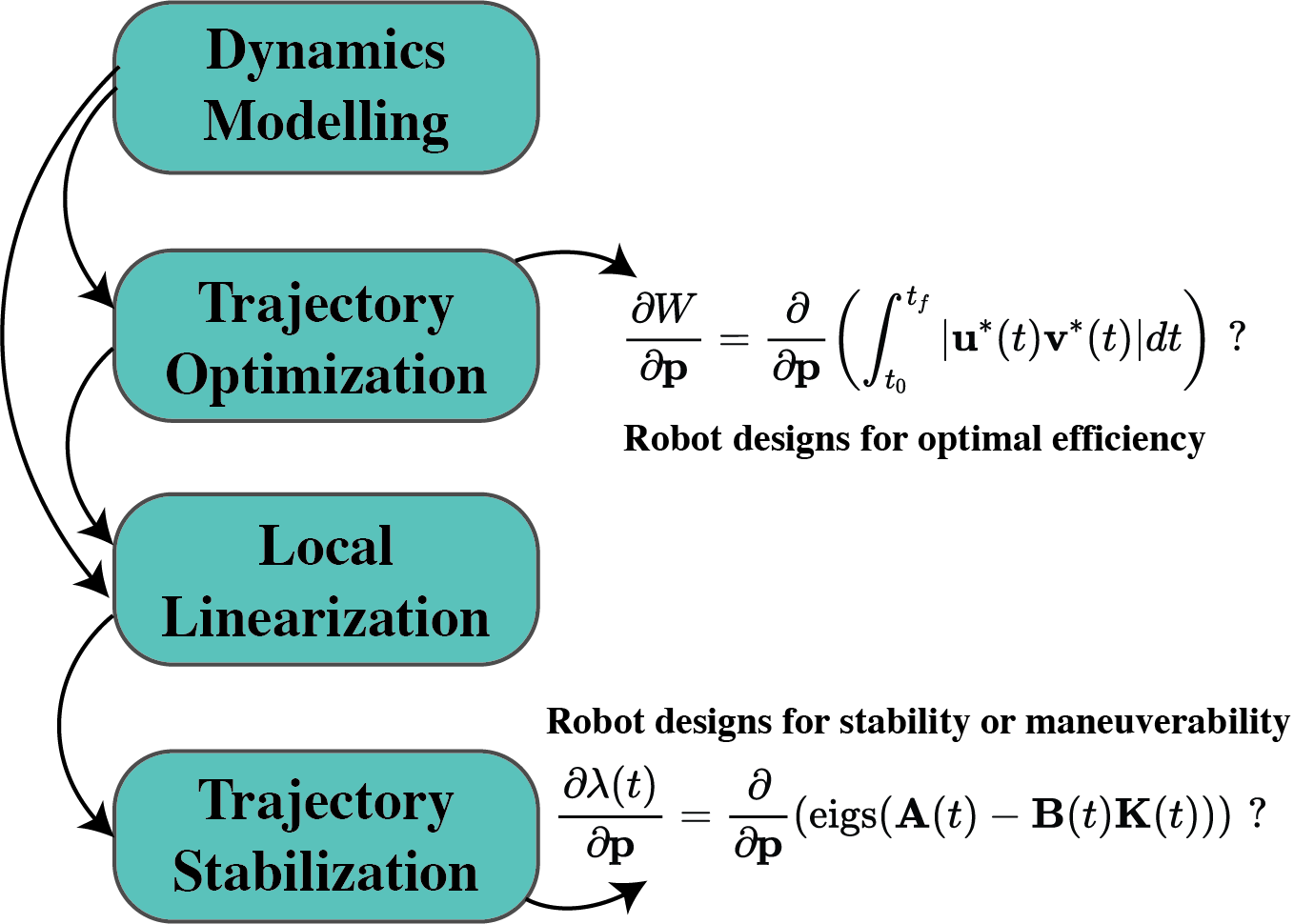
Differentiable Direct Collocation for Hardware-Software Co-Design
[Code]
|
Comparison of Data-Driven Methods on Discovering the Dynamics of the Unforced Multi-axis Cart System
[Paper]
|
Stability Prediction via Parameter Estimation from Milling Time Series
[Paper]
|
A Model-Free Sampling Method for Basins of Attraction Using Hybrid Active Learning
[Project page]
[Paper]
|
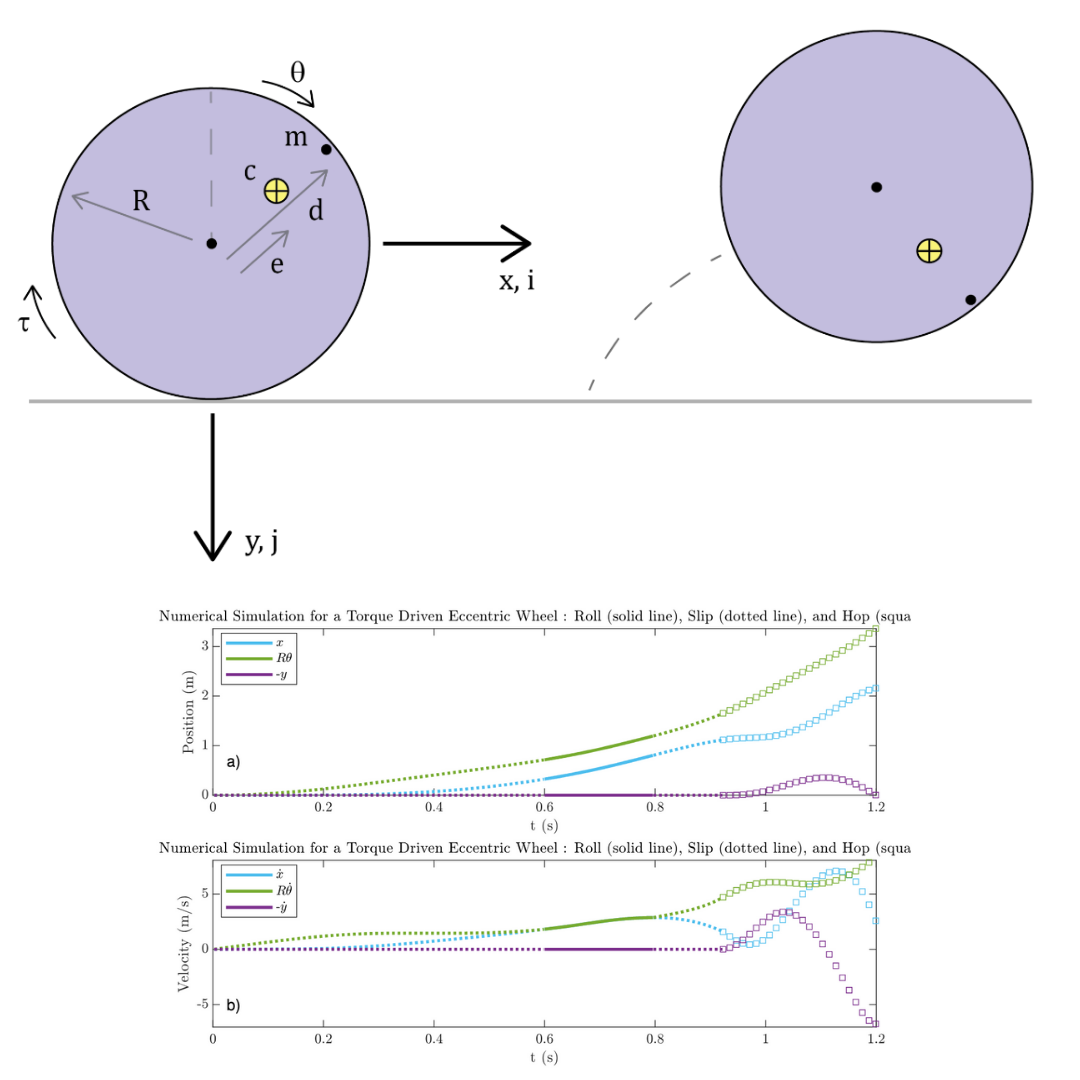
Supervised Learning for Abrupt Change Detection in a Driven Eccentric Wheel
[Paper]
|
The Eccentric Disk and Its Eccentric Behavior
[Paper]
|
Education
|
|
Duke University - Durham, NC, USA
2026 (expected), Ph.D. in Mechanical Engineering and Materials Science |
|
University of Kentucky - Lexington, KY, USA
2019, B.S. in Exercise Science and Statistics (Topical Studies) |